MNIST DCGAN(Deep Convolution Generative Adversarial Network)
DCGANは2015年頃に提案されたGANを拡張したものである。
GANと同様にGeneratorとDiscriminatorの2つのモデルを持つが、モデルの内部構造が異なる。
DCGANの変更点
最初に提案されたGANでは
- 学習が不安定なこと
- Generatorが生成するデータにノイズが含まれていたり、データ自体が意味的に、視覚的に理解が難しいものが生成されること
などといった問題があげられる。
DCGANでは次のような変更点を加えることで上記の問題の改善をしている。
GeneratorとDiscriminatorのネットワーク構造を多層パーセプトロン(MLP)ではなく畳み込みニューラルネットワーク(CNN)を使って構築すること。またCNNでは畳み込み層の次に最大プーリング(Max Pooling)を適用しているものが多いが、DCGANでは Max Pooling などを無くした畳み込み層のみからなる All Convolution NetというCNNを採用する。
AlexnetなどのCNNでは何層もの畳み込み層と最大プーリング層の後、出力には最後の畳み込みの値を平坦化(Flatten)して全結合層に渡して計算したものを出力としているのが多い。 DCGANではGeneratorとDiscriminatorの出力に全結合層を用いない。逆に全結合層を排除するとも言える。そのためGeneratorの出力は最後の畳み込みの値に活性化関数を適用したものを、Discriminatorの出力には最後の畳み込みの値を平均プーリングしたものを出力とする。
学習の不安定さの対策として両モデルの中間の畳み込み層にバッチ正規化(Batch Normalization)を適用する。
これらの変更で、以前のGANより学習が安定して、かつ精密なものを生成できるようになっている。
DCGANの構造
既に述べたのようにGeneratorとDiscriminatorはCNNで構築する。
論文では生成モデルのネットワーク構造として以下の図が載っている。

ここでは載っていないが、畳み込み層のあとにバッチ正規化を適用したものをLeakyRelu関数などの活性化関数で活性化して次の畳み込み層に渡す。
またGeneratorでの畳み込みは、アップサンプリング(誤ってデコンボリューションとも)と呼ばれる畳み込みである。
Generatorでは中間層の活性化関数にRelu関数、出力層の活性化関数にTanh関数を用い、Discriminatorには中間層の活性化関数にLeakyRelu関数、出力層の活性化関数にSigmoid関数を用いると論文にて説明されている。
DCGANでの目的関数はGANと同様であるので省略する
Tensorflowを用いたDCGANの実装
MNISTの訓練データを使って精度の確認をする。
ここでは論文通りのネットワーク構造ではなく3層で、各層のパラメータのユニット数を削減し、出力を64*64から28*28に変更したものを実装する
またDiscriminatorの畳み込みのパラメータにだけ重み減衰を適用する
Generatorの実装
def batch_norm(X, scale, offset, axes, is_train, device_name='/cpu:0'):
# 予測のときにはそのまんまの値を返す
if is_train is False:
return X
epsilon = 1e-5
with tf.device(device_name):
mean, variance = tf.nn.moments(X, axes)
bn = tf.nn.batch_normalization(X, mean, variance, offset, scale,epsilon)
return bn
class Generator():
def __init__(self, device_name='/cpu:0'):
# Generator parameter
with tf.device(device_name):
self.gen_w0 = tf.Variable(
tf.random_normal(
shape=[100,4*4*256], stddev=0.02, dtype=tf.float32),
name="gen_w0")
self.gen_b0 = tf.Variable(
tf.random_normal(
shape=[4*4*256], stddev=0.02, dtype=tf.float32),
name="gen_b0")
self.gen_w1 = tf.Variable(
tf.random_normal(
shape=[4, 4, 128, 256], stddev=0.02, dtype=tf.float32),
name="gen_w1")
self.gen_b1 = tf.Variable(
tf.random_normal(
shape=[128], stddev=0.02, dtype=tf.float32),
name="gen_b1")
self.gen_w2 = tf.Variable(
tf.random_normal(
shape=[4, 4, 64, 128], stddev=0.02, dtype=tf.float32),
name="gen_w2")
self.gen_b2 = tf.Variable(
tf.random_normal(
shape=[64], stddev=0.02, dtype=tf.float32),
name="gen_b2")
self.gen_w3 = tf.Variable(
tf.random_normal(
shape=[4, 4, 1, 64], stddev=0.02, dtype=tf.float32),
name="gen_w3")
self.gen_b3 = tf.Variable(
tf.random_normal(
shape=[1], stddev=0.02, dtype=tf.float32),
name="gen_b3")
self.gen_scale_w1 = tf.Variable(
tf.ones([128]), name="gen_scale_w1")
self.gen_offset_w1 = tf.Variable(
tf.zeros([128]), name="gen_offset_w1")
self.gen_scale_w2 = tf.Variable(
tf.ones([64]), name="gen_scale_w2")
self.gen_offset_w2 = tf.Variable(
tf.zeros([64]), name="gen_offset_w2")
self.keep_prob = tf.placeholder(tf.float32)
self.batch_size = tf.placeholder(tf.int32)
def run(self, z, is_train, device_name='/cpu:0'):
with tf.device(device_name):
h0 = tf.reshape(tf.nn.relu(tf.nn.xw_plus_b(z, self.gen_w0, self.gen_b0)),[-1,4,4,256])
gen_conv1 = tf.nn.conv2d_transpose(
value=h0,
filter=self.gen_w1,
output_shape=[self.batch_size,7,7,128],
strides=[1, 2, 2, 1],
padding='SAME')+self.gen_b1
h1 = tf.nn.leaky_relu(batch_norm(gen_conv1, self.gen_scale_w1, self.gen_offset_w1,
[0, 1, 2], is_train, device_name),alpha=0.2)
gen_conv2 = tf.nn.conv2d_transpose(
value=h1,
filter=self.gen_w2,
output_shape=[self.batch_size,14,14,64],
strides=[1, 2, 2, 1],
padding='SAME')+self.gen_b2
h2 = tf.nn.leaky_relu(batch_norm(gen_conv2, self.gen_scale_w2, self.gen_offset_w2,
[0, 1, 2], is_train, device_name),alpha=0.2)
gen_conv3 = tf.nn.tanh(
tf.nn.conv2d_transpose(
value=h2,
filter=self.gen_w3,
output_shape=[self.batch_size,28,28,1],
strides=[1, 2, 2, 1],
padding='SAME')+self.gen_b3)
return gen_conv3
アップサンプリングに相当する操作はtf.nn.conv2d_transpose()で行える。
中間層の活性化関数としてRelu関数ではなくLeakyRelu関数を適用する
GANと同様に各パラメータに名前をつけておくこと
Discriminatorの実装
class Discrimitor():
def __init__(self, device_name='/cpu:0'):
# Discrimitor parameter
with tf.device(device_name):
self.dis_w1 = tf.Variable(
tf.random_normal(
shape=[4, 4, 1, 64], stddev=0.02, dtype=tf.float32),
name="dis_w1")
self.dis_b1 = tf.Variable(
tf.random_normal(
shape=[64], stddev=0.02, dtype=tf.float32),
name="dis_b1")
self.dis_w2 = tf.Variable(
tf.random_normal(
shape=[4, 4, 64, 128], stddev=0.02, dtype=tf.float32),
name="dis_w2")
self.dis_b2 = tf.Variable(
tf.random_normal(
shape=[128], stddev=0.02, dtype=tf.float32),
name="dis_b2")
self.dis_w3 = tf.Variable(
tf.random_normal(
shape=[4, 4, 128, 256], stddev=0.02, dtype=tf.float32),
name="dis_w3")
self.dis_b3 = tf.Variable(
tf.random_normal(
shape=[256], stddev=0.02, dtype=tf.float32),
name="dis_b3")
self.dis_w4 = tf.Variable(
tf.random_normal(
shape=[4*4*256,1], stddev=0.02, dtype=tf.float32),
name="dis_w4")
self.dis_b4 = tf.Variable(
tf.random_normal(
shape=[1], stddev=0.02, dtype=tf.float32),
name="dis_b4")
def run(self, x, is_train, device_name='/cpu:0'):
with tf.device(device_name):
input_layer = tf.reshape(x, [-1, 28, 28, 1])
dis_conv1 = tf.nn.conv2d(
input=input_layer,
filter=self.dis_w1,
strides=[1, 2, 2, 1],
padding='SAME')+self.dis_b1
h1 = tf.nn.leaky_relu(dis_conv1,alpha=0.2)
dis_conv2 = tf.nn.conv2d(
input=h1,
filter=self.dis_w2,
strides=[1, 2, 2, 1],
padding='SAME')+self.dis_b2
h2 =tf.nn.leaky_relu(dis_conv2,alpha=0.2)
dis_conv3 = tf.nn.conv2d(
input=h2,
filter=self.dis_w3,
strides=[1, 2, 2, 1],
padding='SAME')+self.dis_b3
h3 = tf.nn.leaky_relu(dis_conv3,alpha=0.2)
h3_flat = tf.reshape(h3,[-1,4*4*256])
fc = tf.nn.sigmoid(tf.nn.xw_plus_b(h3_flat,weights=self.dis_w4,biases=self.dis_b4))
return fc
Discriminatorにおける畳み込みはダウンサンプリングである
論文では出力を最後の畳み込み層の値を平均プーリングしシグモイド関数を適用したものであるが、ここでは論文で定義しているネットワークと同じものではないため全結合層に渡したものを出力とする。
またGANでのDiscriminatorと同じようにバッチ正規化を適用しない
DCGAN
class DCGAN():
def __init__(self, using_gpu):
self.device_name = '/cpu:0'
if (using_gpu):
self.device_name = '/gpu:0'
print('using : {}'.format(self.device_name))
with tf.device(self.device_name):
self.G_is_train = tf.placeholder(tf.bool)
self.D_is_train = tf.placeholder(tf.bool)
self.input_X = tf.placeholder(tf.float32, shape=(None, 28 * 28))
# t0は0のラベルを格納し、t1は1のラベルを格納する
self.label_t0 = tf.placeholder(tf.float32, shape=(None, 1))
self.label_t1 = tf.placeholder(tf.float32, shape=(None, 1))
# Generator
self.generator = Generator(device_name=self.device_name)
# 生成モデルに必要なノイズの入れ物
self.gen_z = tf.placeholder(tf.float32, shape=(None, 100))
# Discrimitor
self.discrimitor = Discrimitor(device_name=self.device_name)
# weight decay
gen_norm_term = tf.nn.l2_loss(self.generator.gen_w2)
+ tf.nn.l2_loss(self.generator.gen_w3)
gen_lambda_ = 0.001
dis_norm_term = tf.nn.l2_loss(self.discrimitor.dis_w2)
+ tf.nn.l2_loss(self.discrimitor.dis_w3)
dis_lambda_ = 0.001
# 訓練データの識別予測
input_X = self.discrimitor.run(
self.input_X,
is_train=self.D_is_train,
device_name=self.device_name)
# 生成されたデータの識別予測
generated_X = self.discrimitor.run(
self.generator.run(
z=self.gen_z,
is_train=self.G_is_train,
device_name=self.device_name),
is_train=self.D_is_train,
device_name=self.device_name)
self.dis_entropy_X = tf.nn.sigmoid_cross_entropy_with_logits(
labels=self.label_t1, logits=input_X)
self.dis_entropy_G = tf.nn.sigmoid_cross_entropy_with_logits(
labels=self.label_t0, logits=generated_X)
self.dis_loss = tf.reduce_mean(
self.dis_entropy_X + self.dis_entropy_G
) + dis_norm_term * dis_lambda_
self.gen_entropy = tf.nn.sigmoid_cross_entropy_with_logits(
labels=self.label_t1, logits=generated_X)
self.gen_loss = tf.reduce_mean(
self.gen_entropy) #+ gen_norm_term * gen_lambda_
# 最適化する際にDならDのみのパラメータを、GならGのみのパラメータを更新するようにしたいのでモデル別の変数を取得する
dis_vars = [
x for x in tf.trainable_variables() if "dis_" in x.name
]
gen_vars = [
x for x in tf.trainable_variables() if "gen_" in x.name
]
# 識別モデルDの最適化
self.opt_d = tf.train.AdamOptimizer(0.0002,beta1=0.1).minimize(
self.dis_loss, var_list=[dis_vars])
# 生成モデルGの最適化
self.opt_g = tf.train.AdamOptimizer(0.0002, beta1=0.5).minimize(
self.gen_loss, var_list=[gen_vars])
def train(self,
X_train=None,
batch_size=100,
epoch_num=1000,
imgpath='./mnist_DCGAN_images/',
ckptpath='./mnist_DCGAN_checkpoints/',
log_file='mnist_DCGAN_loss_log.csv',
init=False):
if X_train is None:
raise TypeError("X_train is None")
# 訓練途中で生成データを作成して保存したいのでその保存先の作成
p = Path(imgpath)
if not (p.is_dir()):
p.mkdir()
# モデルパラメータのチェックポイントの保存先
ckpt_p = Path(ckptpath)
if not (ckpt_p.is_dir()):
ckpt_p.mkdir()
config = tf.ConfigProto()
config.gpu_options.allow_growth = True
saver = tf.train.Saver()
sess = tf.Session()
if (init):
sess.run(tf.global_variables_initializer())
print('Initialize')
ckpt = tf.train.get_checkpoint_state(str(ckpt_p.absolute()))
if ckpt:
# checkpointファイルから最後に保存したモデルへのパスを取得する
last_model = ckpt.model_checkpoint_path
print("load {0}".format(last_model))
# 学習済みモデルを読み込む
saver.restore(sess, last_model)
step = len(X_train) // batch_size
#step = mnist.train.num_examples // batch_size
# 正解ラベルのミニバッチ
t1_batch = np.ones((batch_size, 1), dtype=np.float32)
t0_batch = np.zeros((batch_size, 1), dtype=np.float32)
for epoch in range(epoch_num):
perm = np.random.permutation(len(X_train))
# 1エポックごとにかかる時間の計測
start = time.time()
for k in range(step):
#X_batch = mnist.train.next_batch(batch_size)[0] /255.
X_batch = X_train[perm][k * batch_size:(k + 1) * batch_size]
# Train Discrimitor
# ノイズ事前分布からノイズをミニバッチ分取得
noise_z = np.random.uniform(
-1, 1, size=[batch_size,100]).astype(np.float32)
sess.run(
self.opt_d,
feed_dict={
self.input_X: X_batch,
self.D_is_train: True,
self.G_is_train: False,
self.gen_z: noise_z,
self.generator.keep_prob: 1.0,
self.generator.batch_size: batch_size,
self.label_t1: t1_batch,
self.label_t0: t0_batch
})
if k % 1 == 0:
# Train Generator
# ノイズ事前分布からノイズをミニバッチ分取得
noise_z = np.random.uniform(
-1, 1, size=[batch_size,100]).astype(np.float32)
sess.run(
self.opt_g,
feed_dict={
self.gen_z: noise_z,
self.D_is_train: False,
self.G_is_train: True,
self.generator.keep_prob: 0.5,
self.generator.batch_size: batch_size,
self.label_t1: t1_batch
})
# 1epoch終了時の損失を表示
noise_z = np.random.uniform(
-1, 1, size=[batch_size,100]).astype(np.float32)
train_dis_loss = sess.run(
self.dis_loss,
feed_dict={
self.input_X: X_batch,
self.D_is_train: False,
self.G_is_train: False,
self.gen_z: noise_z,
self.generator.keep_prob: 1.0,
self.generator.batch_size: batch_size,
self.label_t1: t1_batch,
self.label_t0: t0_batch
})
train_gen_loss = sess.run(
self.gen_loss,
feed_dict={
self.gen_z: noise_z,
self.D_is_train: False,
self.G_is_train: False,
self.generator.keep_prob: 1.0,
self.generator.batch_size: batch_size,
self.label_t1: t1_batch
})
print(
"[Train] epoch: %d, dis loss: %f , gen loss : %f Time : %f" %
(epoch, train_dis_loss, train_gen_loss, time.time() - start))
f = open(log_file, 'a')
log_writer = csv.writer(f, lineterminator='\n')
loss_list = []
loss_list.append(epoch)
loss_list.append(train_dis_loss)
loss_list.append(train_gen_loss)
# 損失の値を書き込む
log_writer.writerow(loss_list)
f.close()
saver.save(sess, str(ckpt_p.absolute()) + '/DCGAN-mnist')
# 10epoch終了毎に生成モデルから1枚の画像を生成する
if epoch % 2 == 0:
noise_z = np.random.uniform(
-1,1, size=[5,100]).astype(np.float32)
z_const = tf.constant(noise_z, dtype=tf.float32)
gen_imgs = ((sess.run(
self.generator.run(z_const, is_train=False),
feed_dict={self.generator.keep_prob: 1.0,self.generator.batch_size: 5})* 0.5)+0.5)*255.
for i in range(0,5):
Image.fromarray(gen_imgs[i].reshape(
28, 28)).convert('RGB').save(
str(p.absolute()) +
'/generate_img_epoch{0}_{1}.jpg'.format(epoch,i))
学習
Generatorの出力に活性化関数Tanhを使っているため、[-1,1]の範囲の値を出力が取りうる。
そのため訓練データも[-1,1]の範囲の値を取るように前処理を行う必要がある。
X_train = (dataset.train.images - 0.5 ) / 0.5
学習を行う
import tensorflow as tf
device_name = tf.test.gpu_device_name()
if device_name != '/device:GPU:0':
raise SystemError('GPU device not found')
print('Found GPU at: {}'.format(device_name))
model = DCGAN(using_gpu=True)
model.train(
X_train=X_train,
batch_size=100,
epoch_num=51,
init=True)
50epochで次のような画像が生成された
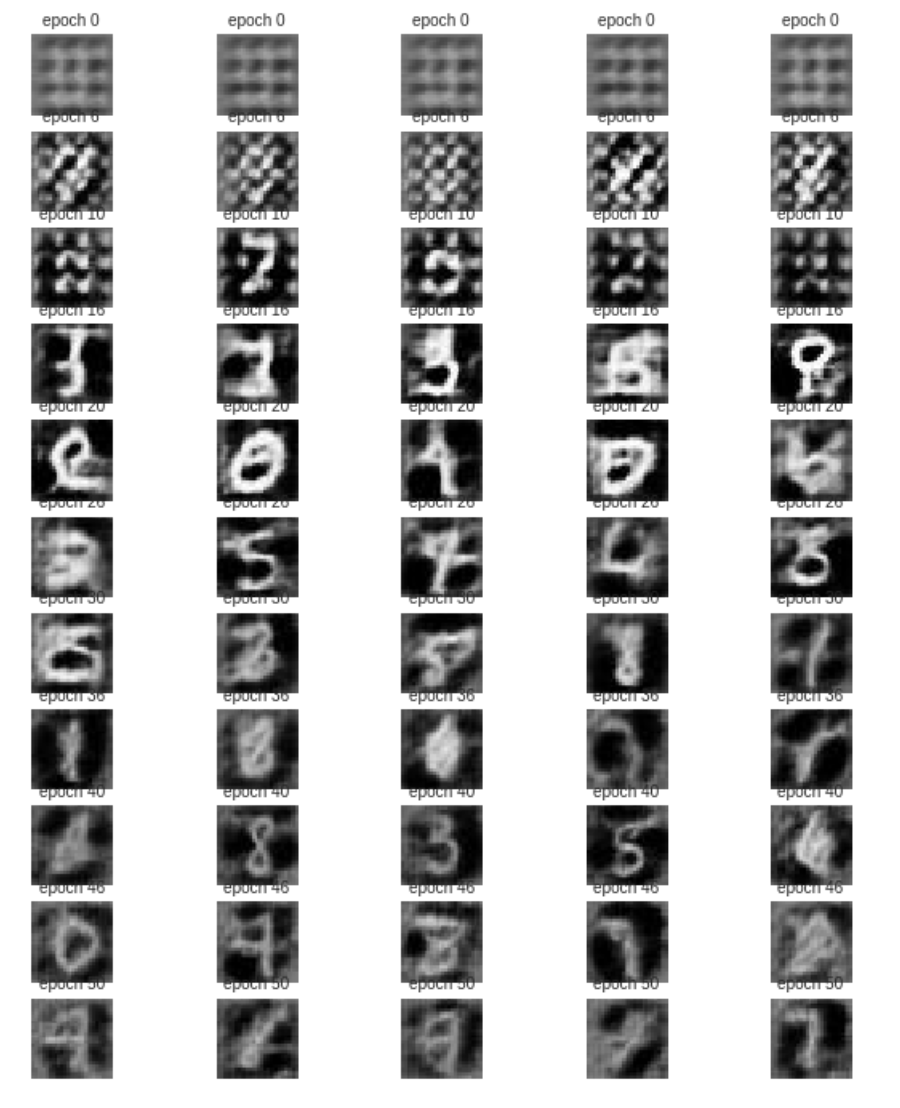
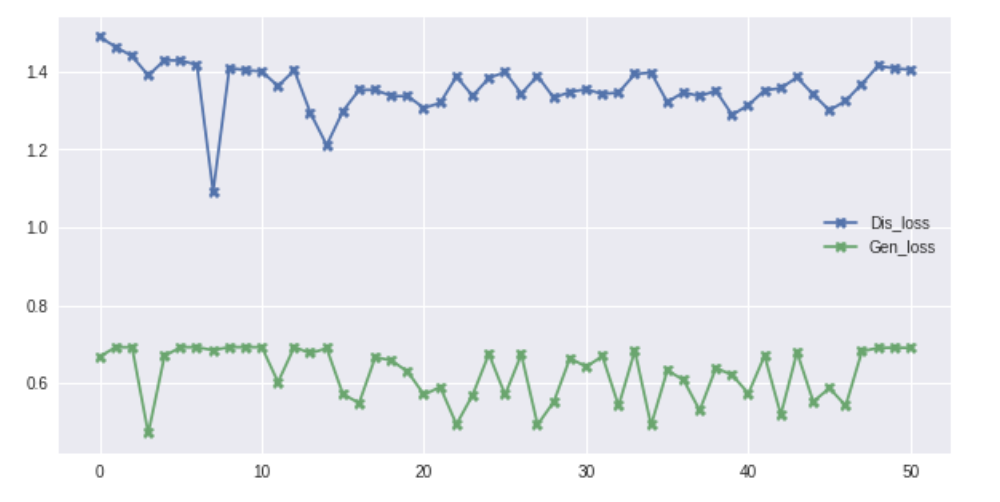
学習経過
Notebook
https://github.com/FaBoPlatform/TensorFlow/blob/master/notebooks/DCGAN_mnist.ipynb