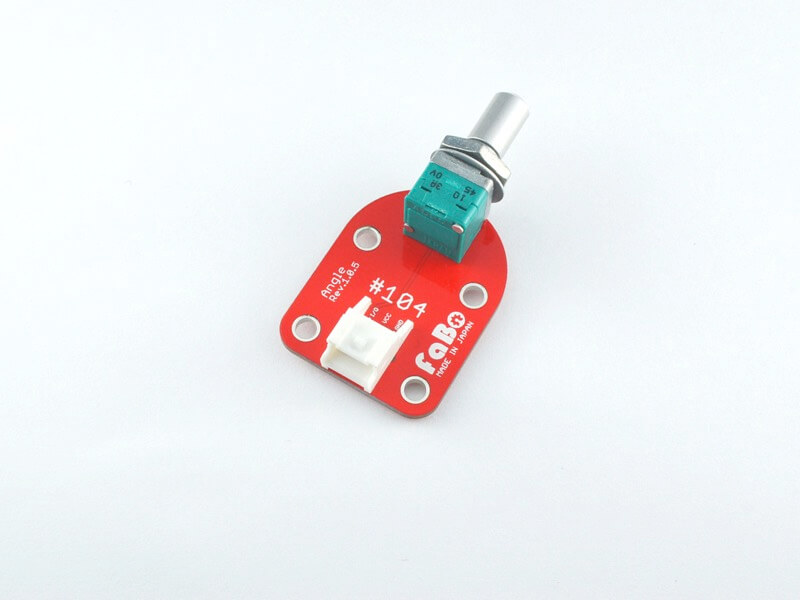
#104 Angle Brick
Overview
ボリューム抵抗を使ったBrickです。
I/Oピンからアナログ値を取得することができます。
LED Brickの明るさを調節する際などに使用します。
Connecting
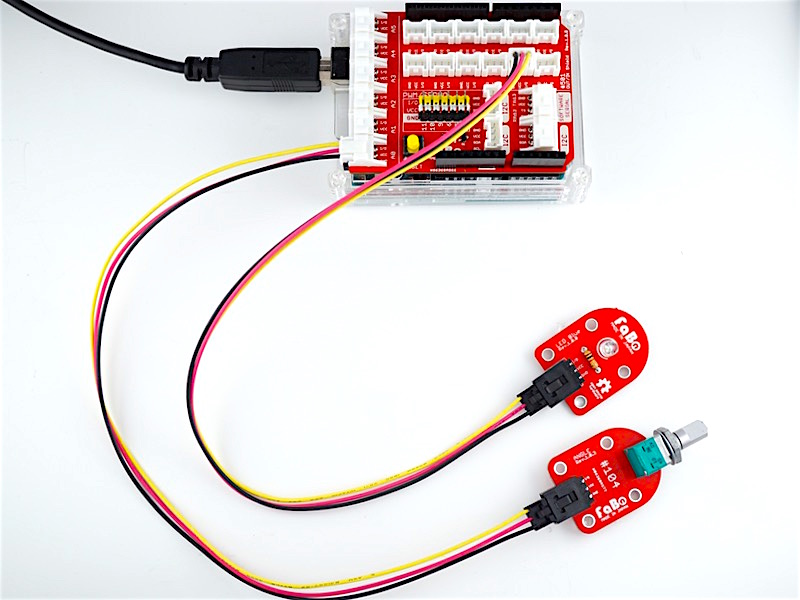
Arduino
アナログコネクタ(A0〜A5)のいずれかに接続します。
Raspberry PI
アナログコネクタ(A0〜A7)のいずれかに接続します。
IchigoJam
アナログ用コネクタ(IN2またはANA()で設定したコネクタ)のどれかに接続します。
Support
| Arduino | RaspberryPI | IchigoJam |
|---|---|---|
| ◯ | ◯ | ◯ |
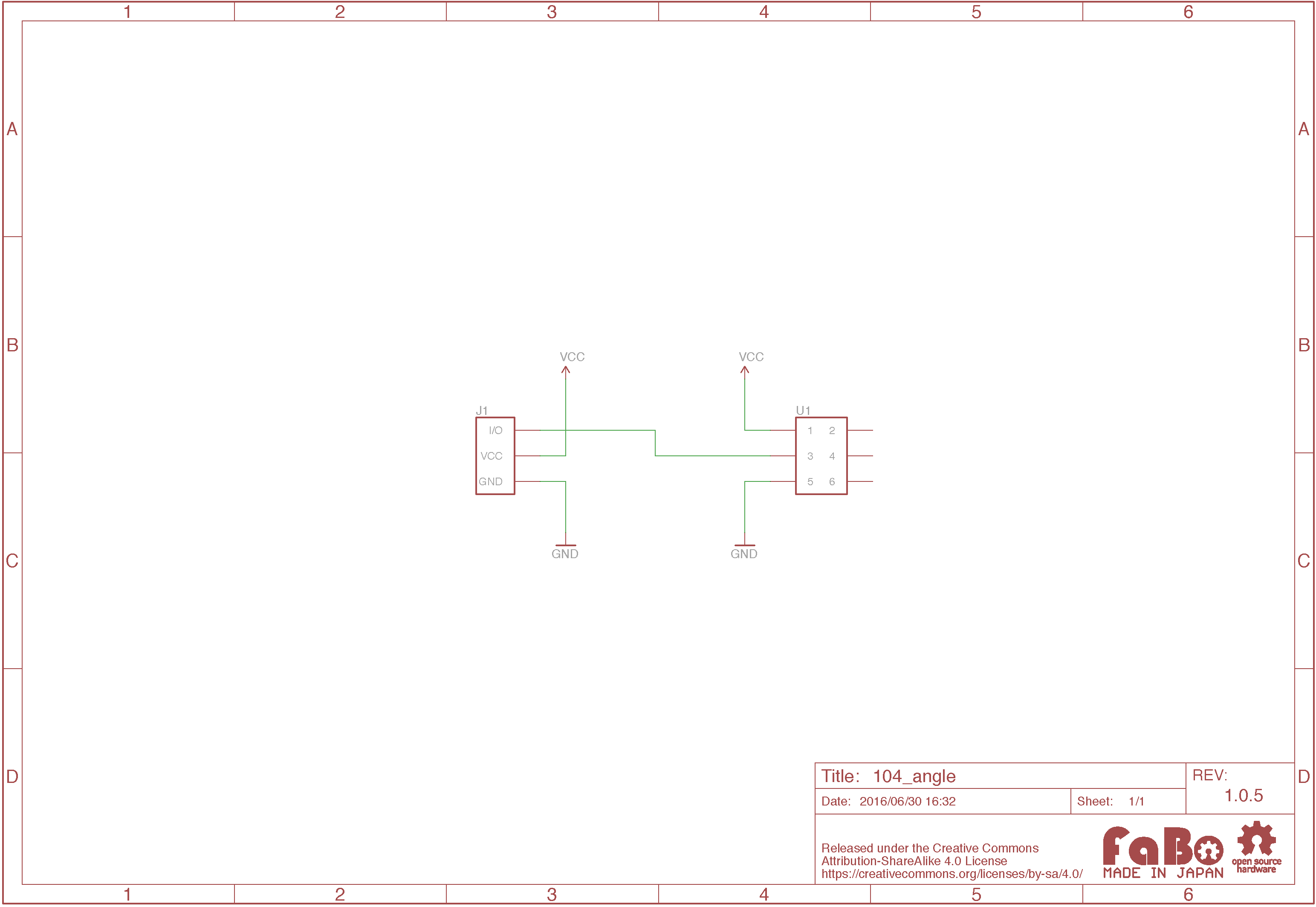
Schematic
Sample Code
for Arduino
A0コネクタにAngleを接続して、D3コネクタに接続したLED Brickの明るさ調節に使用しています。
//
// FaBo Brick Sample
//
// #104 Angle Brick
//
#define anglePin A0 // Angleピン
#define ledPin 3 // LEDピン
int angleValue = 0;
int outputValue = 0;
void setup() {
// Angleピンを入力用に設定
pinMode(anglePin, INPUT);
// LEDピンを出力用に設定
pinMode(ledPin, OUTPUT);
}
void loop() {
// Angleから値を取得(0〜1023)
angleValue = analogRead(anglePin);
// analogWrite用に取得した値を変換
outputValue = map(angleValue, 0, 1023, 0, 255);
// PWMによりLED点灯
analogWrite(ledPin, outputValue);
}
for Raspbery PI
A0コネクタにAngle Brickを接続して、D3コネクタに接続したLED Brickの明るさ調節に使用しています。
#!/usr/bin/env python
# coding: utf-8
#
# FaBo Brick Sample
#
# #104 Angle Brick
#
import RPi.GPIO as GPIO
import spidev
import time
import sys
# A0コネクタにAngleを接続
ANGLEPIN = 0
# GPIO4コネクタにLEDを接続
LEDPIN = 4
# GPIOポートを設定
GPIO.setwarnings(False)
GPIO.setmode( GPIO.BCM )
GPIO.setup( LEDPIN, GPIO.OUT )
# PWM/100Hzに設定
LED = GPIO.PWM(LEDPIN, 100)
# 初期化
LED.start(0)
spi = spidev.SpiDev()
spi.open(0,0)
def readadc(channel):
adc = spi.xfer2([1,(8+channel)<<4,0])
data = ((adc[1]&3) << 8) + adc[2]
return data
def arduino_map(x, in_min, in_max, out_min, out_max):
return (x - in_min) * (out_max - out_min) // (in_max - in_min) + out_min
if __name__ == '__main__':
try:
while True:
data = readadc(ANGLEPIN)
print("adc : {:8} ".format(data))
value = arduino_map(data, 0, 1023, 0, 100)
LED.ChangeDutyCycle(value)
time.sleep( 0.01 )
except KeyboardInterrupt:
LED.stop()
GPIO.cleanup()
spi.close()
sys.exit(0)
for IchigoJam
注意
アナログはIN2のみで数値取得可能です。
デジタルの場合はIN(2)、アナログの場合がANA(2)とします。
100 'ANGLE_sample_program
110 CLS
120 LOCATE 10,8:PRINT "Digital =";IN(2)
130 LOCATE 10,9:PRINT "Analog =";ANA(2);" "
140 GOTO 120
つまみを回すと数値が変化します。
for NRF52
#include <stdbool.h>
#include <stdint.h>
#include <stdio.h>
#include "nrf.h"
#include "nrf_drv_saadc.h"
#include "app_uart.h"
#include "app_error.h"
#include "nrf_delay.h"
#include "app_util_platform.h"
#include <string.h>
#define UART_TX_BUF_SIZE 256 /**< UART TX buffer size. */
#define UART_RX_BUF_SIZE 1 /**< UART RX buffer size. */
#define FABO_RX 22
#define FABO_TX 23
#define FABO_CTS 0
#define FABO_RTS 0
#define FABO_A0 3
static nrf_saadc_value_t m_buffer_pool[1];
static uint32_t m_adc_evt_counter;
/**
* @brief UART events handler.
*/
void uart_events_handler(app_uart_evt_t * p_event)
{
}
/**
* @brief UART initialization.
*/
void uart_config(void)
{
uint32_t err_code;
const app_uart_comm_params_t comm_params =
{
FABO_RX,
FABO_TX,
FABO_RTS,
FABO_CTS,
APP_UART_FLOW_CONTROL_DISABLED,
false,
UART_BAUDRATE_BAUDRATE_Baud38400
};
APP_UART_FIFO_INIT(&comm_params,
UART_RX_BUF_SIZE,
UART_TX_BUF_SIZE,
uart_events_handler,
APP_IRQ_PRIORITY_LOW,
err_code);
APP_ERROR_CHECK(err_code);
}
void saadc_callback(nrf_drv_saadc_evt_t const * p_event)
{
if (p_event->type == NRF_DRV_SAADC_EVT_DONE)
{
ret_code_t err_code;
err_code = nrf_drv_saadc_buffer_convert(p_event->data.done.p_buffer, 1);
APP_ERROR_CHECK(err_code);
printf("ADC event number: %d\r\n",(int)m_adc_evt_counter);
printf("%d\r\n", p_event->data.done.p_buffer[0]);
m_adc_evt_counter++;
}
}
void saadc_init(void)
{
ret_code_t err_code;
nrf_saadc_channel_config_t channel_config =
NRF_DRV_SAADC_DEFAULT_CHANNEL_CONFIG_SE(FABO_A0);
err_code = nrf_drv_saadc_init(NULL, saadc_callback);
APP_ERROR_CHECK(err_code);
err_code = nrf_drv_saadc_channel_init(0, &channel_config);
APP_ERROR_CHECK(err_code);
err_code = nrf_drv_saadc_buffer_convert(m_buffer_pool,1);
APP_ERROR_CHECK(err_code);
}
/**
* @brief Function for main application entry.
*/
int main(void)
{
uart_config();
printf("\n\rSAADC HAL simple example.\r\n");
saadc_init();
while(true)
{
ret_code_t err_code;
err_code = nrf_drv_saadc_sample();
APP_ERROR_CHECK(err_code);
nrf_delay_ms(1000);
}
}
for Cylon.js
var Cylon = require('cylon');
Cylon.robot({
connections: {
arduino: { adaptor: 'firmata', port: '/dev/tty.usbmodem1421' }
},
devices: {
sensor: { driver: 'analog-sensor', pin: 0, lowerLimit: 0, upperLimit: 1023}
},
work: function(my) {
var angleValue = 0;
every((1).second(), function(){
angleValue = my.sensor.analogRead();
console.log('angle value =>', angleValue);
});
my.sensor.on('lowerLimit', function(val){
console.log('Lower angle value =>', val);
});
my.sensor.on('upperLimit', function(val){
console.log('upper angle value =>', val);
});
}
}).start();
for Edison
A0コネクタにAngleを接続して、D3コネクタに接続したLED Brickの明るさ調節に使用しています。
//
// FaBo Brick Sample
//
// #104 Angle Brick
//
//library
var m = require('mraa');
//pin setup
var angle_pin = new m.Aio(0); //Angle pin A0
var led_pin = new m.Pwm(3); //LED pin D3
var value = 0.0;
led_pin.enable(true);
led_pin.period_us(2000);
//call loop function
loop();
function loop()
{
var get_value = angle_pin.read()
value = get_value / 1024;
led_pin.write(value);
//100 milliseconds
setTimeout(loop,100);
}
Parts
- ボリューム抵抗器A 10k