#201 3Axis I2C Brick

Overview
3軸加速度センサーを使用したBrickです。
I2Cで3軸の加速度データを取得することがきます。
センサー取得データについて
このBrickでは下の図の3軸の値を取得します。
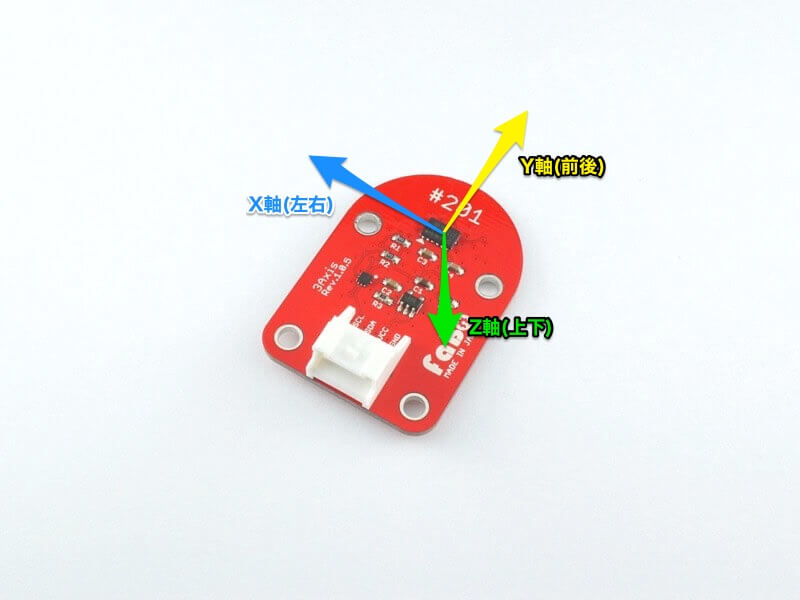
それぞれ矢印の方向に力がかかるとプラス、逆方向ではマイナスとなります。
なお、このBrickを水平に置いた場合、重力がZ軸にかかっている状態となるので、X軸、Y軸が0に近く、Z軸のみ高い値となります。
Connecting
4Pinケーブルで、OUT/INシールドのI2Cコネクタへ接続します。
※4Pinケーブル、各種OUT/INシールド、各種ケースは別売です。
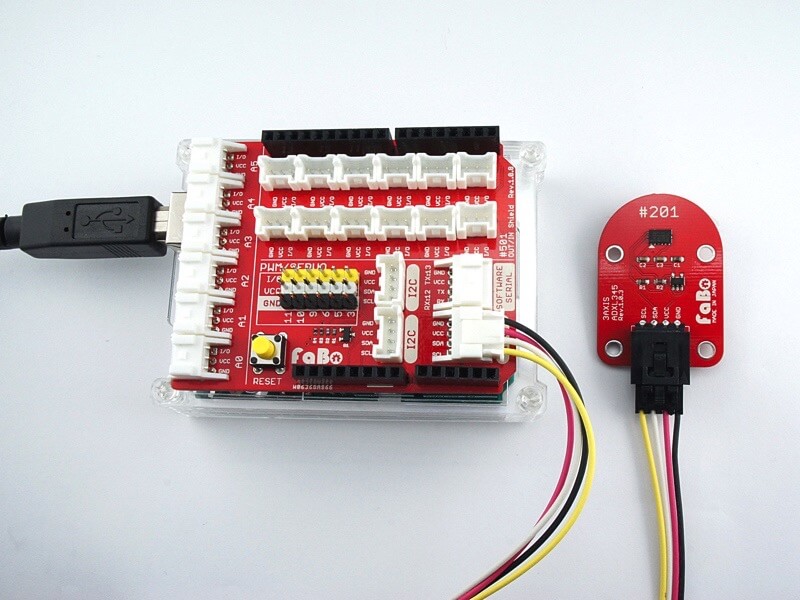
写真はArduinoでの接続例です。
Support
| Arduino | RaspberryPI | IchigoJam | NRF51 | Edison |
|---|---|---|---|---|
| ◯ | ◯ | ◯ | ◯ | ◯ |
ADXL345 Datasheet
| Document |
|---|
| ADXL345 Datasheet |
Register
| I2C Slave Address |
|---|
| 0x53 |
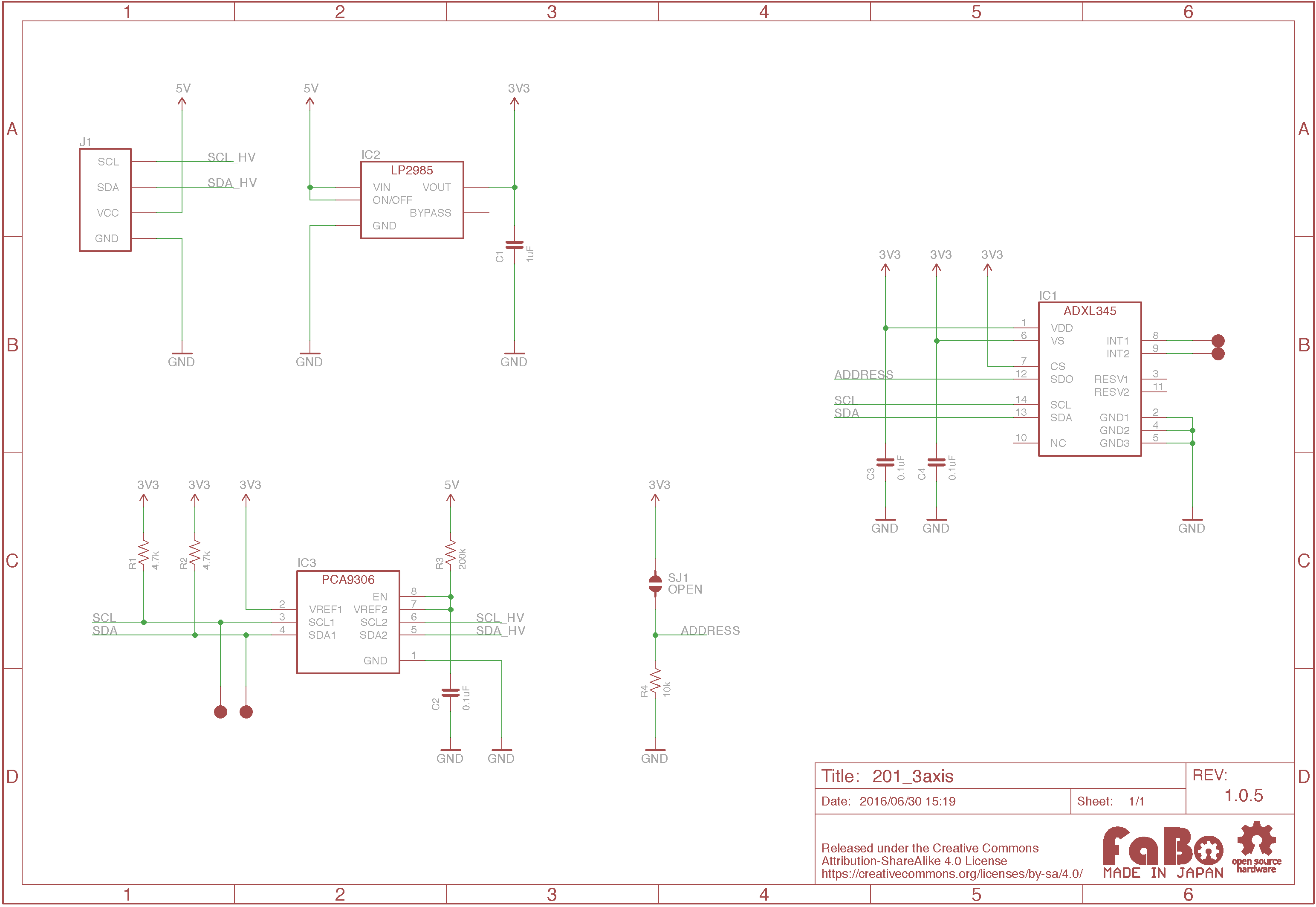
Schematic
Library
for Arduino
-
ライブラリ名:「FaBo 201 3Axis ADXL345」
- Library Document
for RapberryPI
- pipからインストール
pip install FaBo3Axis_ADXL345 - Library GitHub
- Library Document
Sample Code
for Arduino
I2Cコネクタに接続した3Axis I2C Brickより3軸の加速度情報を取得し、シリアルモニタに出力します。
//
// FaBo Brick Sample
//
// #201 3AXIS I2C Brick
//
#include <Wire.h>
#define DEVICE_ADDR (0x53) // スレーブデバイスのアドレス
byte axis_buff[6];
void setup()
{
Serial.begin(9600); // シリアルの開始デバック用
Wire.begin(); // I2Cの開始
// 生存確認
Serial.println("Checking I2C device...");
byte who_am_i = 0x00;
readI2c(0x00, 1, &who_am_i);
if(who_am_i == 0xe5){
Serial.println("I am ADXL345");
}else{
Serial.println("Not detected");
}
// 初期化
Serial.println("Init...");
// DATA_FORMAT
writeI2c(0x31, 0x00);
// POWER_TCL
writeI2c(0x2d, 0x08);
}
void loop()
{
uint8_t length = 6;
readI2c(0x32, length, axis_buff); //レジスターアドレス 0x32から6バイト読む
int x = (((int)axis_buff[1]) << 8) | axis_buff[0];
int y = (((int)axis_buff[3]) << 8) | axis_buff[2];
int z = (((int)axis_buff[5]) << 8) | axis_buff[4];
Serial.print("x: ");
Serial.print( x );
Serial.print(" y: ");
Serial.print( y );
Serial.print(" z: ");
Serial.println( z );
delay(100);
}
// I2Cへの書き込み
void writeI2c(byte register_addr, byte value) {
Wire.beginTransmission(DEVICE_ADDR);
Wire.write(register_addr);
Wire.write(value);
Wire.endTransmission();
}
// I2Cへの読み込み
void readI2c(byte register_addr, int num, byte buffer[]) {
Wire.beginTransmission(DEVICE_ADDR);
Wire.write(register_addr);
Wire.endTransmission();
Wire.beginTransmission(DEVICE_ADDR);
Wire.requestFrom(DEVICE_ADDR, num);
int i = 0;
while(Wire.available())
{
buffer[i] = Wire.read();
i++;
}
Wire.endTransmission();
}
for Raspberry Pi
I2Cコネクタに接続した3Axis I2C Brickより3軸の加速度情報を取得し、コンソールに出力します。
# coding: utf-8
import smbus
import time
ADDRESS = 0x53
CHANNEL = 1
DATA_FORMAT = 0x31
POWER_CTL = 0x2d
DATA_XYZ = 0x32
bus = smbus.SMBus(CHANNEL)
class ADXL345:
def __init__(self, address):
self.address = address
bus.write_byte_data(self.address, DATA_FORMAT, 0x00)
bus.write_byte_data(self.address, POWER_CTL, 0x08)
def read(self):
data = bus.read_i2c_block_data(self.address, DATA_XYZ, 6)
x = data[0] | (data[1] << 8)
if(x & (1 << 16 - 1)):
x = x - (1<<16)
y = data[2] | (data[3] << 8)
if(y & (1 << 16 - 1)):
y = y - (1<<16)
z = data[4] | (data[5] << 8)
if(z & (1 << 16 - 1)):
z = z - (1<<16)
return {"x": x, "y": y, "z": z}
if __name__ == "__main__":
adxl345 = ADXL345(ADDRESS)
while True:
axes = adxl345.read()
print " x = " , ( axes['x'] )
print " y = " , ( axes['y'] )
print " z = " , ( axes['z'] )
print
time.sleep(1)
for Ichigojam
I2Cコネクタに接続した3Axis I2C Brickより3軸の加速度情報を取得し、画面上に出力します。
10 'FaBo Brick Sample
20 '#201 3axis I2C Brick
30 CLS
100 'Slave address
110 C=#53
200 'Address set
210 POKE #800,#31,0,#2D,8
220 POKE #810,#32,6
300 'init
310 A=I2CW(C,#800,1,#801,1)
320 A=I2CW(C,#802,1,#803,1)
400 'Read 3axis data
410 A=I2CW(C,#810,1,#811,1)
420 A=I2CR(C,#810,1,#820,6)
500 'Output
510 LOCATE 0,3
520 ?"X:";PEEK(#820)+PEEK(#821)*256;" "
530 ?"Y:";PEEK(#822)+PEEK(#823)*256;" "
540 ?"Z:";PEEK(#824)+PEEK(#825)*256;" "
600 'loop
610 WAIT 5
620 GOTO 410
for NRF51
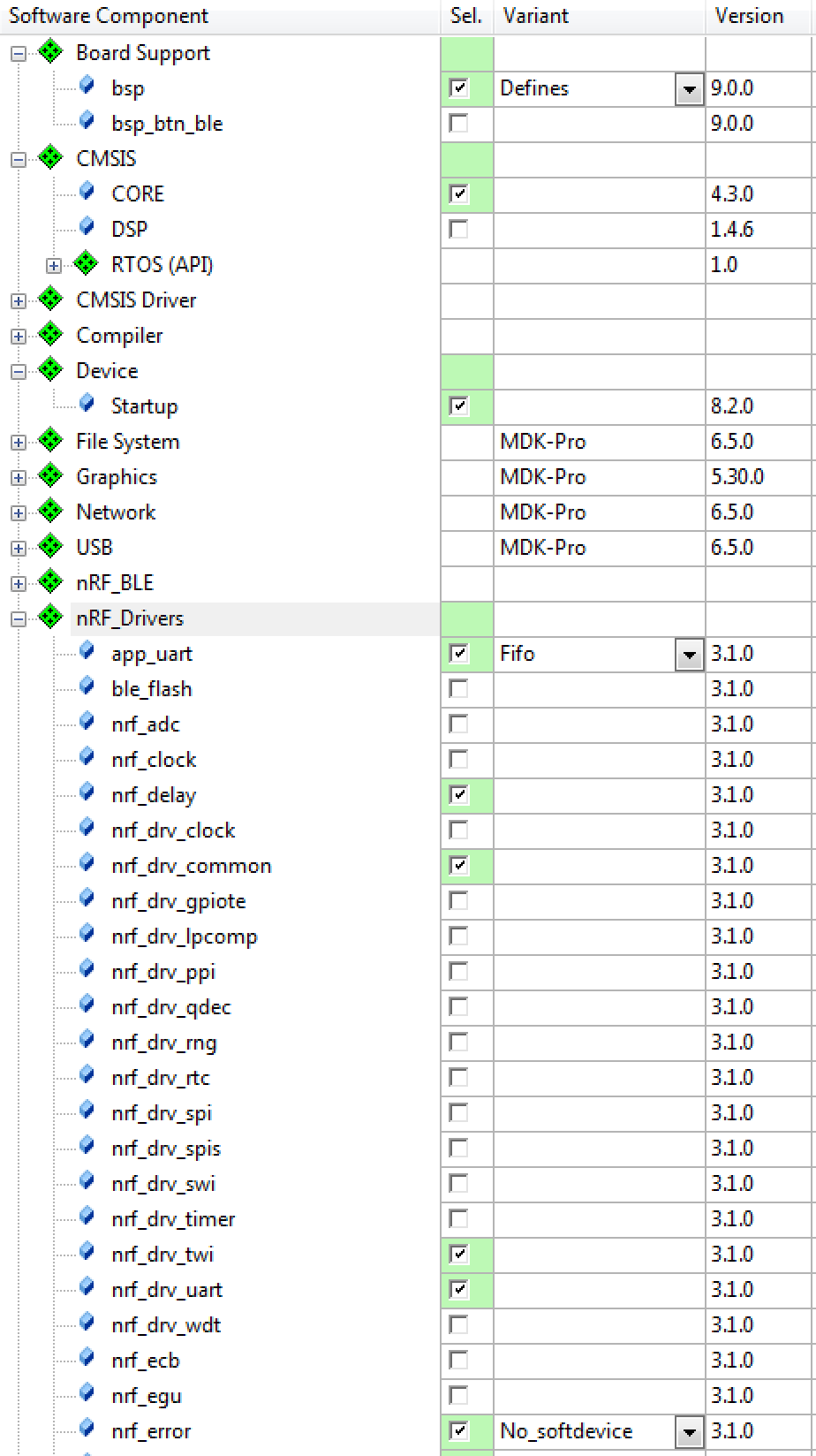
- PackはnRF_Librariesのapp_twiとapp_traceを読み込む

#include "app_trace.h"
#include "app_error.h"
#include "app_twi.h"
#include "app_util_platform.h"
#include "nrf_delay.h"
// I2Cのピン番号
#define I2C_SCL_PIN 7
#define I2C_SDA_PIN 30
// 最大トランザクション数
#define MAX_PENDING_TRANSACTIONS 5
// スレーブアドレス
static uint16_t device_address = 0x53;
// Twiインスタンス
static app_twi_t m_app_twi = APP_TWI_INSTANCE(0);
// Twi初期化
void twi_init (void)
{
ret_code_t err_code;
const nrf_drv_twi_config_t twi_config = {
.scl = I2C_SCL_PIN,
.sda = I2C_SDA_PIN,
.frequency = NRF_TWI_FREQ_100K,
.interrupt_priority = APP_IRQ_PRIORITY_LOW
};
APP_TWI_INIT(&m_app_twi, &twi_config, MAX_PENDING_TRANSACTIONS, err_code);
APP_ERROR_CHECK(err_code);
}
// 指定レジスタに1Byte書き込む
void twi_write_byte(uint8_t register_address, uint8_t data)
{
uint8_t buff[] = {register_address, data};
app_twi_transfer_t const transfers[] = {
APP_TWI_WRITE(device_address, buff, 2, 0),
};
APP_ERROR_CHECK(app_twi_perform(&m_app_twi, transfers, 1, NULL));
}
// 指定レジスタを読み込む
void twi_read(uint8_t register_address, char *buff, uint8_t size)
{
app_twi_transfer_t const transfers[] = {
APP_TWI_WRITE(device_address, ®ister_address, 1, APP_TWI_NO_STOP),
APP_TWI_READ (device_address, buff, size, 0)
};
APP_ERROR_CHECK(app_twi_perform(&m_app_twi, transfers, 2, NULL));
}
// 指定レジスタを1Byteだけ読み込む
uint8_t twi_read_byte(uint8_t register_address)
{
char buff = 0;
twi_read(register_address, &buff, 1);
return buff;
}
// メイン
int main() {
app_trace_init();
printf("start\n");
twi_init();
// デバイスID確認
uint8_t dev = twi_read_byte(0x00);
if (dev == 0xe5) {
printf("I am ADXL345");
} else {
printf("device:%d\n", dev);
return 0;
}
// データフォーマットをFULL_RES, r-Justify, +-2gに設定
twi_write_byte(0x31, 0x0F);
// 計測モードに設定
twi_write_byte(0x2d, 0x08);
// 加速度を計測
char buff[6] = {0};
while(true) {
__WFE();
nrf_delay_ms(500);
twi_read(0x32, buff, 6);
short x = buff[1] << 8 | buff[0];
short y = buff[3] << 8 | buff[2];
short z = buff[5] << 8 | buff[4];
printf("x:%d, y:%d, z:%d\n", x, y, z);
}
}
for Edison
Node.js用のサンプルです。
I2Cコネクタに接続した3Axis I2C Brickより3軸の加速度情報を取得し、コンソールに出力します。
//
// FaBo Brick Sample
//
// #201 3axis i2c Brick
//
var m = require('mraa');
var i2c = new m.I2c(0);
i2c.address(0x53);
var buff = new Buffer(6);
i2c.writeReg(0x31, 0x00);
i2c.writeReg(0x2d, 0x08);
loop();
function loop()
{
buff = i2c.readBytesReg(0x32, 6);
var x = buff[0] + (buff[1]<<8);
if(x & (1 << 16 - 1)){
x = x - (1<<16);
}
var y = buff[2] + (buff[3]<<8);
if(y & (1 << 16 - 1)){
y = y - (1<<16);
}
var z = buff[4] + (buff[5]<<8);
if(z & (1 << 16 - 1)){
z = z - (1<<16);
}
console.log("x:"+x);
console.log("y:"+y);
console.log("z:"+z);
setTimeout(loop,500);
}
Parts
- Analog Devices ADXL345