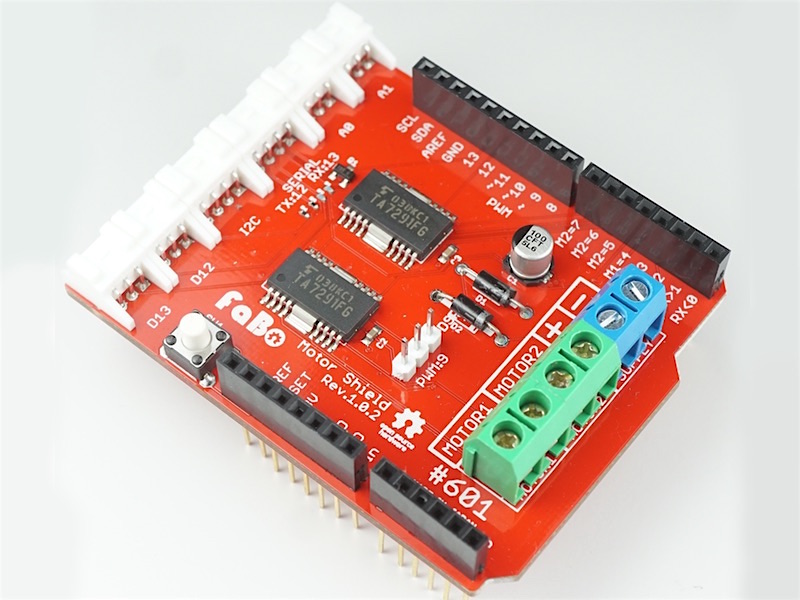
#601 Motor Shield for Arduino
Overview
2個のDCモーターを制御することができるシールドです。
モーターを動かすには外部からの電源供給が必要になります。
コネクタ
DCモータ用コネクタ
- Moter1用コネクタ
- D2 (信号1)
- D4 (信号2)
- Moter2用コネクタ
- D5 (信号1)
- D7 (信号2)
- 外部電源(DCモータ用)
アナログコネクタ
- A0
- A1
デジタルコネクタ
- D12
- D13
PWM/Servoコネクタ
- サーボモータ接続用コネクタ
- PWMに対応するD9
シリアルコネクタ
SoftwareSerialとして使用するため、RX,TXはそれぞれ、D12,D13になります
I2Cコネクタ
Arduino MEGAではR3以降から対応になります。 Arduino UNO R3/R2では使用可能です。
PIN配置について
モーターシールドのピンは以下のようになっています。
| Pin | モーターNo | 説明 |
|---|---|---|
| D2 | 1 | 信号1 |
| D3 | 1 | 出力値設定 |
| D4 | 1 | 信号2 |
| Pin | モーターNo | 説明 |
|---|---|---|
| D5 | 2 | 信号1 |
| D6 | 2 | 出力値設定 |
| D7 | 2 | 信号2 |
動作方法について
モーター(モータードライバ)に対して2つの信号を送り、その組み合わせによってモーターを制御することができます。
| 信号1 | 信号2 | 動作 |
|---|---|---|
| HIGH | LOW | 前進 |
| LOW | HIGH | 後退 |
| LOW | LOW | 静止 |
信号1、信号2の両方をHIGHにすると、部品が壊れる可能性があるので設定しないようにして下さい。
for Arduino
void setup()
{
// DCモーター1
pinMode(2, OUTPUT); // モーター1のピン1(前進用)
pinMode(3, OUTPUT); // モーター1の出力設定用
pinMode(4, OUTPUT); // モーター1のピン2(後退用)
// DCモーター2
pinMode(5, OUTPUT); // モーター2のピン1(前進用)
pinMode(6, OUTPUT); // モーター2の出力設定用
pinMode(7, OUTPUT); // モーター2のピン2(後退用)
}
void loop()
{
// モーター1の設定(HIGH/LOW:前進)
digitalWrite(2, HIGH);
digitalWrite(4, LOW);
analogWrite(3, 255); // 0-255 強さ
// モーター2の設定(LOW/HIGH:後退)
digitalWrite(5, LOW);
digitalWrite(7, HIGH);
analogWrite(6, 255); // 0-255 強さ
delay(10);
}