#211 7Segment LED I2C Brick
Overview
7セグメントLEDを使ったBrickです。
I2Cで表示パターンを制御できます。
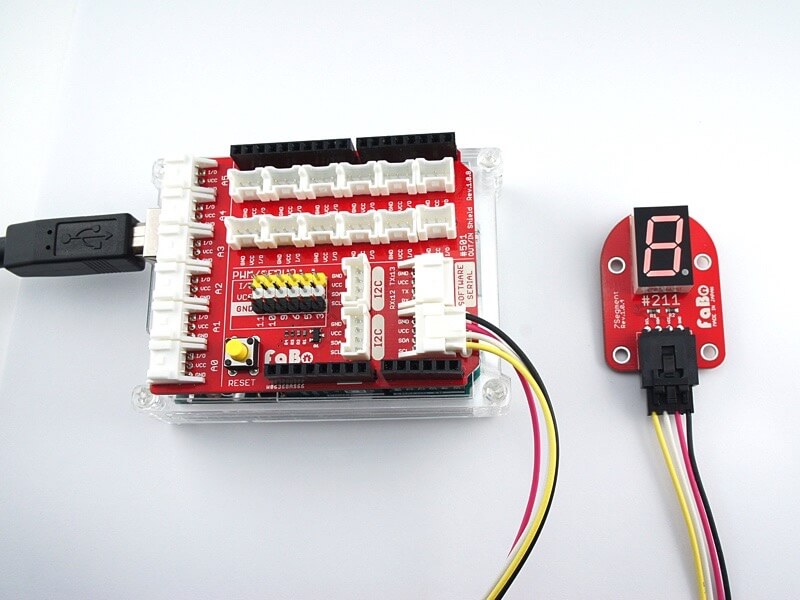
Connecting
I2Cコネクタへ接続します。
Support
| Arduino | RaspberryPI | IchigoJam |
|---|---|---|
| ◯ | ◯ | ◯ |
TLC59208F Datasheet
| Document |
|---|
| TLC59208F Datasheet |
Register
| A0 | A1 | A2 | Slave Address |
|---|---|---|---|
| LOW | LOW | LOW | 0x20 |
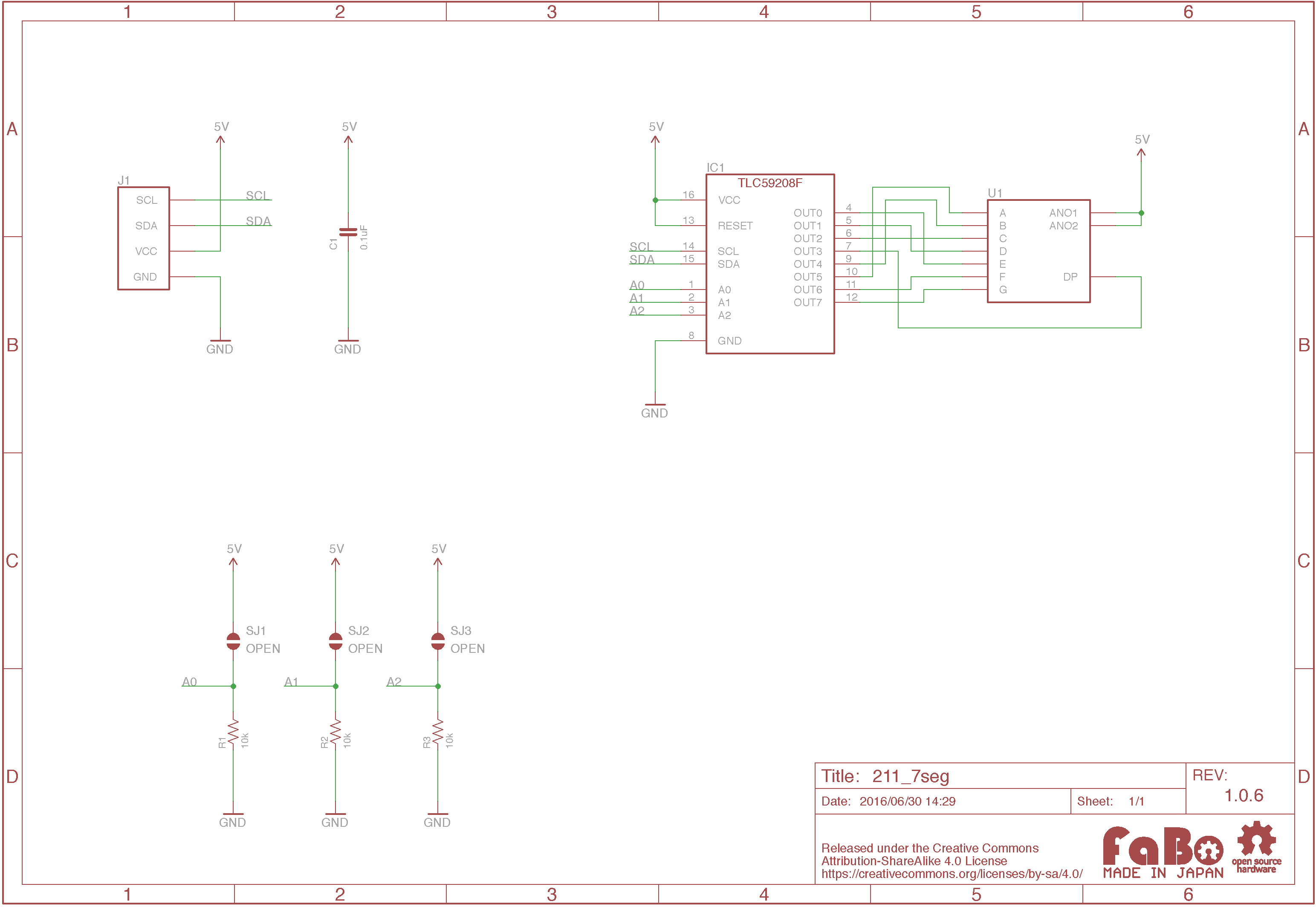
FaBo Brickでは、初期値に0x20が設定されています。Brick裏面のソルダージャンパーで設定を変更できます。
Schematic
Library
for Arduino
-
ライブラリ名:「FaBo 211 7Segment LED TLC59208F」
- Library Document
for RapberryPI
- pipからインストール
pip install FaBo7Seg_TLC59208 - Library GitHub
- Library Document
Sample Code
PWM出力値は、"0x02"でほぼ視認できる明るさで点灯されます。あまり高い数値にすると、点灯しなくなるおそれがあります。
for Arduino
I2Cコネクタに7Segment LED Brickを接続し、「0〜9」、「.」を順番に表示させます。
//
// FaBo Brick Sample
//
// #211 7Segment LED I2C Brick
//
#include <Wire.h>
#define ADDR0 0x20
void setup() {
Wire.begin();
Serial.begin(9600);
Serial.println();
Serial.println("RESET");
ini(ADDR0);
}
void loop() {
for (int i = 0; i<12; i++) {
Serial.println(i) ;
show(ADDR0, i);
delay(500);
}
}
void show(byte addr, int num){
unsigned char PWM_Value = 0x02;
switch (num) {
case 0:
// 0:ABCDEF
Wire.beginTransmission(addr);
Wire.write(0xA2);
Wire.write(PWM_Value); // PWM0 E
Wire.write(PWM_Value); // PWM1 D
Wire.write(PWM_Value); // PWM2 C
Wire.write(0x00); // PWM3 DP
Wire.write(PWM_Value); // PWM4 B
Wire.write(PWM_Value); // PWM5 A
Wire.write(PWM_Value); // PWM6 F
Wire.write(0x00); // PWM7 G
Wire.endTransmission();
break;
case 1:
// 1:BC
Wire.beginTransmission(addr);
Wire.write(0xA2);
Wire.write(0x00); // PWM0 E
Wire.write(0x00); // PWM1 D
Wire.write(PWM_Value); // PWM2 C
Wire.write(0x00); // PWM3 DP
Wire.write(PWM_Value); // PWM4 B
Wire.write(0x00); // PWM5 A
Wire.write(0x00); // PWM6 F
Wire.write(0x00); // PWM7 G
Wire.endTransmission();
break;
case 2:
// 2:ABDEG
Wire.beginTransmission(addr);
Wire.write(0xA2);
Wire.write(PWM_Value); // PWM0 E
Wire.write(PWM_Value); // PWM1 D
Wire.write(0x00); // PWM2 C
Wire.write(0x00); // PWM3 DP
Wire.write(PWM_Value); // PWM4 B
Wire.write(PWM_Value); // PWM5 A
Wire.write(0x00); // PWM6 F
Wire.write(PWM_Value); // PWM7 G
Wire.endTransmission();
break;
case 3:
// 3:ABCDG
Wire.beginTransmission(addr);
Wire.write(0xA2);
Wire.write(0x00); // PWM0 E
Wire.write(PWM_Value); // PWM1 D
Wire.write(PWM_Value); // PWM2 C
Wire.write(0x00); // PWM3 DP
Wire.write(PWM_Value); // PWM4 B
Wire.write(PWM_Value); // PWM5 A
Wire.write(0x00); // PWM6 F
Wire.write(PWM_Value); // PWM7 G
Wire.endTransmission();
break;
case 4:
// 4:BCFG
Wire.beginTransmission(addr);
Wire.write(0xA2);
Wire.write(0x00); // PWM0 E
Wire.write(0x00); // PWM1 D
Wire.write(PWM_Value); // PWM2 C
Wire.write(0x00); // PWM3 DP
Wire.write(PWM_Value); // PWM4 B
Wire.write(0x00); // PWM5 A
Wire.write(PWM_Value); // PWM6 F
Wire.write(PWM_Value); // PWM7 G
Wire.endTransmission();
break;
case 5:
// 5:ACDFG
Wire.beginTransmission(addr);
Wire.write(0xA2);
Wire.write(0x00); // PWM0 E
Wire.write(PWM_Value); // PWM1 D
Wire.write(PWM_Value); // PWM2 C
Wire.write(0x00); // PWM3 DP
Wire.write(0x00); // PWM4 B
Wire.write(PWM_Value); // PWM5 A
Wire.write(PWM_Value); // PWM6 F
Wire.write(PWM_Value); // PWM7 G
Wire.endTransmission();
break;
case 6:
// 6:ACDEFG
Wire.beginTransmission(addr);
Wire.write(0xA2);
Wire.write(PWM_Value); // PWM0 E
Wire.write(PWM_Value); // PWM1 D
Wire.write(PWM_Value); // PWM2 C
Wire.write(0x00); // PWM3 DP
Wire.write(0x00); // PWM4 B
Wire.write(PWM_Value); // PWM5 A
Wire.write(PWM_Value); // PWM6 F
Wire.write(PWM_Value); // PWM7 G
Wire.endTransmission();
break;
case 7:
// 7:ABCF
Wire.beginTransmission(addr);
Wire.write(0xA2);
Wire.write(0x00); // PWM0 E
Wire.write(0x00); // PWM1 D
Wire.write(PWM_Value); // PWM2 C
Wire.write(0x00); // PWM3 DP
Wire.write(PWM_Value); // PWM4 B
Wire.write(PWM_Value); // PWM5 A
Wire.write(PWM_Value); // PWM6 F
Wire.write(0x00); // PWM7 G
Wire.endTransmission();
break;
case 8:
// 8:ABCDEFG
Wire.beginTransmission(addr);
Wire.write(0xA2);
Wire.write(PWM_Value); // PWM0 E
Wire.write(PWM_Value); // PWM1 D
Wire.write(PWM_Value); // PWM2 C
Wire.write(0x00); // PWM3 DP
Wire.write(PWM_Value); // PWM4 B
Wire.write(PWM_Value); // PWM5 A
Wire.write(PWM_Value); // PWM6 F
Wire.write(PWM_Value); // PWM7 G
Wire.endTransmission();
break;
case 9:
// 9:ABCDFG
Wire.beginTransmission(addr);
Wire.write(0xA2);
Wire.write(0x00); // PWM0 E
Wire.write(PWM_Value); // PWM1 D
Wire.write(PWM_Value); // PWM2 C
Wire.write(0x00); // PWM3 DP
Wire.write(PWM_Value); // PWM4 B
Wire.write(PWM_Value); // PWM5 A
Wire.write(PWM_Value); // PWM6 F
Wire.write(PWM_Value); // PWM7 G
Wire.endTransmission();
break;
case 10:
// Dot
Wire.beginTransmission(addr);
Wire.write(0xA2);
Wire.write(0x00); // PWM0 E
Wire.write(0x00); // PWM1 D
Wire.write(0x00); // PWM2 C
Wire.write(PWM_Value); // PWM3 DP
Wire.write(0x00); // PWM4 B
Wire.write(0x00); // PWM5 A
Wire.write(0x00); // PWM6 F
Wire.write(0x00); // PWM7 G
Wire.endTransmission();
break;
default:
// off
Wire.beginTransmission(addr);
Wire.write(0xA2);
Wire.write(0x00); // PWM0 E
Wire.write(0x00); // PWM1 D
Wire.write(0x00); // PWM2 C
Wire.write(0x00); // PWM3 DP
Wire.write(0x00); // PWM4 B
Wire.write(0x00); // PWM5 A
Wire.write(0x00); // PWM6 F
Wire.write(0x00); // PWM7 G
Wire.endTransmission();
break;
}
}
void ini(byte addr){
Wire.beginTransmission(addr);
Wire.write(0x80); //
Wire.write(0x81); // MODE1
Wire.write(0x03); // MODE2
Wire.write(0x00); // PWM0
Wire.write(0x00); // PWM1
Wire.write(0x00); // PWM2
Wire.write(0x00); // PWM3
Wire.write(0x00); // PWM4
Wire.write(0x00); // PWM5
Wire.write(0x00); // PWM6
Wire.write(0x00); // PWM7
Wire.write(0xFF); // GRPPWM
Wire.write(0x00); // GRPFREQ
Wire.write(0xAA); // LEDOUT0
Wire.write(0xAA); // LEDOUT1
Wire.write(0x92); // SUBADR1
Wire.write(0x94); // SUBADR2
Wire.write(0x98); // SUBADR3
Wire.write(0xD0); // ALLCALLADR
Wire.endTransmission();
}
for Raspberry PI
I2Cコネクタに7seg Brickを接続し、「0〜9」、「.」を順番に表示させます。
# coding: utf-8
#
# FaBo Brick Sample
#
# #211 7Segment LED I2C Brick
#
import smbus
import time
ADDRESS = 0x20 #TLC59208F device address
CHANNEL = 1
INIT = 0x80 #設定用
SEGSET = 0xA2 #7segLEDへ出力設定
VALUE = 0x01 #LED点灯設定
ZERO = 0x00 #LED消灯設定
#初期設定用
init_set = [0x81, #MODE1
0x03, #MODE2
0x00, #PWM0
0x00, #PWM1
0x00, #PWM2
0x00, #PWM3
0x00, #PWM4
0x00, #PWM5
0x00, #PWM6
0x00, #PWM7
0xFF, #GRPPWM
0x00, #GRPREQ
0xAA, #LEDOUT0
0xAA, #LEDOUT1
0x92, #SUBADR1
0x94, #SUBADR2
0x98, #SUBADR3
0xD0] #ALLCALLADR
#数値出力用
set = [[VALUE, #PWM0 [0]出力用の設定値 (set[0][0:])
VALUE, #PWM1
VALUE, #PWM2
ZERO, #PWM3
VALUE, #PWM4
VALUE, #PWM5
VALUE, #PWM6
ZERO] #PWM7
,
[ZERO, #PWM0 [1]出力用の設定値 (set[1][0:])
ZERO, #PWM1
VALUE, #PWM2
ZERO, #PWM3
VALUE, #PWM4
ZERO, #PWM5
ZERO, #PWM6
ZERO] #PWM7
,
[VALUE, #PWM0 [2]出力用の設定値 (set[2][0:])
VALUE, #PWM1
ZERO, #PWM2
ZERO, #PWM3
VALUE, #PWM4
VALUE, #PWM5
ZERO, #PWM6
VALUE] #PWM7
,
[ZERO, #PWM0 [3]出力用の設定値 (set[3][0:])
VALUE, #PWM1
VALUE, #PWM2
ZERO, #PWM3
VALUE, #PWM4
VALUE, #PWM5
ZERO, #PWM6
VALUE] #PWM7
,
[ZERO, #PWM0 [4]出力用の設定値 (set[4][0:])
ZERO, #PWM1
VALUE, #PWM2
ZERO, #PWM3
VALUE, #PWM4
ZERO, #PWM5
VALUE, #PWM6
VALUE] #PWM7
,
[ZERO, #PWM0 [5]出力用の設定値 (set[5][0:])
VALUE, #PWM1
VALUE, #PWM2
ZERO, #PWM3
ZERO, #PWM4
VALUE, #PWM5
VALUE, #PWM6
VALUE] #PWM7
,
[VALUE, #PWM0 [6]出力用の設定値 (set[6][0:])
VALUE, #PWM1
VALUE, #PWM2
ZERO, #PWM3
ZERO, #PWM4
VALUE, #PWM5
VALUE, #PWM6
VALUE] #PWM7
,
[ZERO, #PWM0 [7]出力用の設定値 (set[7][0:])
ZERO, #PWM1
VALUE, #PWM2
ZERO, #PWM3
VALUE, #PWM4
VALUE, #PWM5
VALUE, #PWM6
ZERO] #PWM7
,
[VALUE, #PWM0 [8]出力用の設定値 (set[8][0:])
VALUE, #PWM1
VALUE, #PWM2
ZERO, #PWM3
VALUE, #PWM4
VALUE, #PWM5
VALUE, #PWM6
VALUE] #PWM7
,
[ZERO, #PWM0 [9]出力用の設定値 (set[9][0:])
VALUE, #PWM1
VALUE, #PWM2
ZERO, #PWM3
VALUE, #PWM4
VALUE, #PWM5
VALUE, #PWM6
VALUE] #PWM7
,
[ZERO, #PWM0 [.]出力用の設定値 (set[10][0:])
ZERO, #PWM1
ZERO, #PWM2
VALUE, #PWM3
ZERO, #PWM4
ZERO, #PWM5
ZERO, #PWM6
ZERO] #PWM7
]
if __name__ == '__main__':
bus = smbus.SMBus(CHANNEL)
#初期設定
bus.write_i2c_block_data(ADDRESS,INIT,init_set)
time.sleep(0.5)
while True:
for num in range(0 , 11):
#ログ出力
print "output:%d" % (num)
#7segLEDへの表示
bus.write_i2c_block_data(ADDRESS,SEGSET,set[num][0:])
time.sleep(1)
for Ichigojam
I2Cコネクタに7seg Brickを接続し、「0〜9」、「.」を順番に表示させます。
10 '#211 7Segment I2C Brick
20 CLS
110 D=#20
210 POKE #800,#80,#A2
220 POKE #810,#81,#3,0,0,0,0,0,0,0,0,#FF,0,#AA,#AA,#92,#94,#98,#D0
225 POKE #830,#2,#2,#2,0,#2,#2,#2,0
230 POKE #838,0,0,#2,0,#2,0,0,0
235 POKE #840,#2,#2,0,0,#2,#2,0,#2
240 POKE #848,0,#2,#2,0,#2,#2,0,#2
245 POKE #850,0,0,#2,0,#2,#0,#2,#2
250 POKE #858,0,#2,#2,0,0,#2,#2,#2
255 POKE #860,#2,#2,#2,0,0,#2,#2,#2
260 POKE #868,0,0,#2,0,#2,#2,#2,0
265 POKE #870,#2,#2,#2,0,#2,#2,#2,#2
270 POKE #878,0,#2,#2,0,#2,#2,#2,#2
275 POKE #880,0,0,0,#2,0,0,0,0
310 A=I2CW(D,#800,1,#810,18)
320 C=0
410 LOCATE 0,3
415 PRINT "Number:";C;" "
420 IF C=0 A=I2CW(D,#801,1,#830,8)
425 IF C=1 A=I2CW(D,#801,1,#838,8)
430 IF C=2 A=I2CW(D,#801,1,#840,8)
435 IF C=3 A=I2CW(D,#801,1,#848,8)
440 IF C=4 A=I2CW(D,#801,1,#850,8)
445 IF C=5 A=I2CW(D,#801,1,#858,8)
450 IF C=6 A=I2CW(D,#801,1,#860,8)
455 IF C=7 A=I2CW(D,#801,1,#868,8)
460 IF C=8 A=I2CW(D,#801,1,#870,8)
465 IF C=9 A=I2CW(D,#801,1,#878,8)
470 IF C=10 A=I2CW(D,#801,1,#880,8)
480 C=C+1
490 IF C>10 C=0
510 WAIT 50
520 GOTO 410
Parts
- 7セグメントLED
- Texas Instruments TLC59208F